如需报告请登录。

域控制器的背景
无人驾驶催生产业链新机遇
无人驾驶进程中的车辆架构发生较大改变——从EE到“计算+通信”。实现汽车软件定义、持续创造价值。传统电子电气架构中,车辆主要由硬件定义,采用分布式的控制单元,专用传感器、专用ECU及算法,资源协同性不高,有一定程度的浪费;计算+通信架构中,旨在实现软件定义车,域控制器在这里发挥重要作用,通过域控制器的整合,分散的车辆硬件之间可以实现信息互联互通和资源共享,软件可升级,硬件和传感器可以更换和进行功能扩展。
无人驾驶进程中车辆电子电气架构从分布到集中
汽车电子电气架构奠定车辆底层框架。汽车电子电气架构是由车企所定义的一套整合方式,是一个偏宏观的概念,类似于人体结构和建筑工程图纸,也就是搭了一副骨架,需要各种“器官”、“血液”和“神经”来填充,使其具有生命力。具体到汽车上来说,EEA把汽车中的各类传感器、ECU、线束拓扑和电子电气分配系统完美地整合在一起,完成运算、动力和能量的分配,实现整车的各项智能化功能。
无人驾驶进程中的车辆架构从分布向集中发展。全球零部件龙头企业博世曾经将汽车电子电气架构划分为三个大阶段:分布式电子电气架构-域集中电子电气架构-车辆集中电子电气架构,三个大阶段之中又分别包含两大发展节点,一共六个发展节点,细化了电子电气架构将从分布式向车辆集中式演变的过程。伴随汽车自动化程度从L0-L5逐级提升,目前大部分的传统车企电子电气架构处在从分布式向域集中过渡的阶段。分布式的电子电气架构主要用在L0-L2级别车型,此时车辆主要由硬件定义,采用分布式的控制单元,专用传感器、专用ECU及算法,资源协同性不高,有一定程度的浪费;从L3级别开始,域集中电子电气架构走向舞台,域控制器在这里发挥重要作用,通过域控制器的整合,分散的车辆硬件之间可以实现信息互联互通和资源共享,软件可升级,硬件和传感器可以更换和进行功能扩展;再往后发展,以特斯拉Model3领衔开发的集中式电子电气架构基本达到了车辆终极理想——也就是车载电脑级别的中央控制架构。
车辆自动驾驶级别主要参照0-5级分类。目前全球公认的汽车自动驾驶技术分级标准主要有两个,分别是由美国高速公路安全管理局和国际自动机工程师学会提出。中国于2020年参考SAE的0-5级的分级框架发布了中国版《汽车驾驶自动化分级》,并结合中国当前实际情况进行了部分调整,大体上也将自动驾驶分为0-5级。
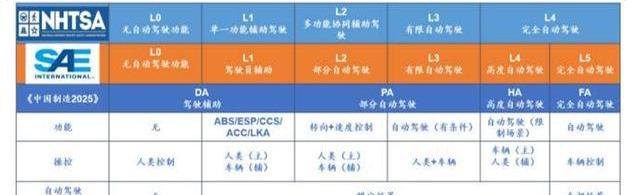
L3级别是汽车自动化道路的一次跃升。从法规和技术两个维度来看,L3级别自动驾驶都是汽车自动化道路上的一大跃升。从法规来看,SAE和中国《汽车自动化分级》规定L0-L2级别均是人类主导驾驶,车辆只做辅助,L0、L1和L2之间的差异主要在于搭载的ADAS功能的多少,而L3开始,人类在驾驶操作中的作用快速下降,车辆自动驾驶系统在条件许可下可以完成所有驾驶操作,驾驶员在系统失效或者超过设计运行条件时对故障汽车进行接管;从技术来看,L0-L2主要运用的传感器有摄像头、超声波雷达和毫米波雷达,L3及之后原有传感器配套数量上升,同时高成本的激光雷达方案难以避开,传感器之间的协同要求提升,多传感器融合算法愈发复杂,所需控制器芯片算力大幅提升。
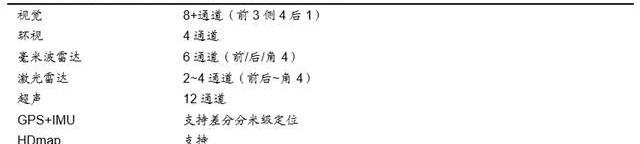
2020年是L3级别车型量产年。奥迪A8是最早实现搭载了L3级别硬件的量产车型,虽然由于法律监管的约束A8始终无法向消费者实现L3级别功能落地,但其2017年推出的5摄像头+12超声波雷达+4毫米波雷达+1激光雷达的量产硬件方案,始终是行业的先驱者之一。奥迪之后,全球多数车企纷纷计划在2020-2021年开始正式量产L3级别车型,如宝马iNEXT、奔驰全新S/C级等车型。
中国的L3量产自2020年长安发布的UNI-T车型始,2020年是我国L3级别车型的量产年,将先后迎来小鹏P7、长安UNI-T、北汽新能源ARCFOXECFConcept、广汽新能源AionLX、奇点iS6等L3级别车型的上市。
域控制器自L3始进入市场。由于L3级别“人车共驾”带来的传感器数量和融合算法的增加,现有广泛使用的传统分布式电子电气架构面临ECU数量增加冗余成本提升、传感器数据耦合困难、布线复杂度提升、线束成本提升等问题,难以支撑车辆L3功能的实现,域集中的电子电气架构自L3起进入舞台。该架构下的核心处理模块——域控制器开始进入市场。接下来的篇幅我们将围绕域控制器的定义、作用、原理、分类、结构以及产业链进行展开。
域控制器的前世今生
前世:汽车ECU的出现及瓶颈
ECU电子控制器单元,又称为汽车的“行车电脑”,它们的用途就是控制汽车的行驶状态以及实现其各种功能。主要是利用各种传感器、总线的数据采集与交换,来判断车辆状态以及司机的意图并通过执行器来操控汽车。
ECU核心在于微处理器。ECU是汽车专用微机控制器,和普通的单片机一样,由微处理器、存储器、输入/输出接口、模数转换器以及整形、驱动等集成电路组成。汽车ECU的核心在于微处理器,微处理器包括MCU、MPU、DSP和逻辑IC等。ECU领先企业包括博世、电装、大陆、Aptiv、伟世通等。
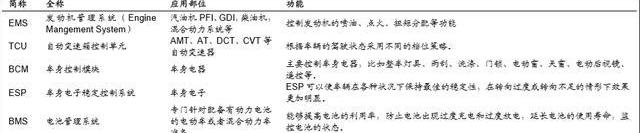
ECU使用范围越来越广泛。1993年,奥迪A8上使用了5个ECU,最开始ECU仅仅用于控制发动机工作,随着今天汽车技术的进步,ECU肩负起了越来越多的重担,例如防抱死制动系统、4轮驱动系统、主动悬架系统、安全气囊系统、自动变速箱都需要单独的控制系统,越来越多的ECU出现在汽车上,汽车添加的诸多设备都需要ECU的管理,如今ECU已经成为汽车上最为常见的部件之一,依据功能的不同可以分为不同的类型。最常见的包括EMS/TCU/BCM/ESP/VCU等。
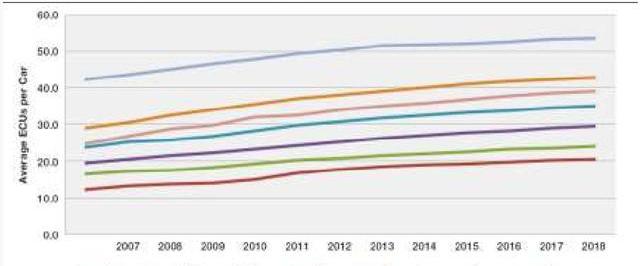
ECU数量迅速增加。随着车辆的电子化程度逐渐提高,ECU占领了整个汽车,从传统的引擎控制系统、安全气囊、防抱死系统、电动助力转向、车身电子稳定系统、车灯控制、空调、水泵油泵、仪表、娱乐影音系统。到现在已经广泛使用的胎压监测系统、无钥匙进入启动系统、电动座椅加热调节,还有不断成熟、方兴未艾,正在普及推广的辅助驾驶系统、矩阵大灯、氛围灯。还有电动汽车上的电驱控制、电池管理系统、车载充电系统,以及蓬勃发展的车载网关、T-BOX和自动驾驶系统等等。这些应用带动了电子控制单元ECU数量的大幅增加,高端车型里的ECU平均达到50-70个,电子结构较为复杂的车型ECU数量或超过100个。
ECU增加面临成本和技术瓶颈,域控制器应运而生。自动驾驶要求更高的算力和更多传感器件,ECU的增长终将迎来爆发,而传统的汽车电子电气架构都是分布式的,汽车里的各个ECU都是通过CAN和LIN总线连接在一起。这种分布式的ECU架构如果无限制扩张,将在成本端和技术端都面临巨大挑战。
全球首单搭乘无人小巴的数字人民币完成测试扣款:2021年8月13日上午9点30分,在苏州高铁新城的一位市民踏上了一辆名为”龙舟ONE“的公交车,用智能手机向车载移动支付设备出示了数字人民币APP付款码,完成了全球首单搭乘无人小巴的数字人民币测试扣款。据悉,本次测试是全国首例智能驾驶车与数字人民币等全功能、全渠道聚合支付载体的运营测试,兼容卡、码、人脸识别等功能,实现了数字人民币、银联云闪付、微信、支付宝、银行掌银快捷支付、交通互联互通卡、苏州市民卡等全渠道支付。智能网联汽车与数字人民币的结合,将助力苏州成为全国首个将智慧公交与数字人民币这两项创新应用巧妙结合的城市。(凤凰网)[2021/8/23 22:32:18]
成本端——
1)算力冗余浪费。ECU的算力不能协同,并相互冗余,产生极大浪费;
2)线束成本提升。这种分布式的架构需要大量的内部通信,客观上导致线束成本大幅增加,同时装配难度也加大。
技术端——
3)多传感器融合算法需要域控制器的统一处理。ADAS系统里有各种传感器如摄像头、毫米波雷达和激光雷达,产生的数据量很大,各种不同的功能都需要这些数据,每个传感器模块可以对数据进行预处理,通过车载以太网传输数据,为了保证数据处理的结果最优化,最好功能控制都集中在一个核心处理器里处理,这就产生了对域控制器的需求;
4)分布式ECU无法统一维护升级。大量分离的嵌入式OS和应用程序Firmware,由不同Tier1提供,语言和编程风格迥异,导致没法统一维护和OTA升级;
5)分布式ECU制约软件生态应用。第三方应用开发者无法与这些硬件进行便捷的编程,成为制约软件定义的瓶颈。
6)保障汽车安全的需求。随着汽车ECU的增多,被外部攻击的可能性也就增多了,现在的汽车与外部的数据交换越来越多,车联网的发展也给黑客提供了攻击的可能性,如果还是分布式架构,就不能很方便地把一些关键系统保护起来,比如引擎控制和制动系统这些属于动力和传动控制方面的。可以单独把这些动力、传动控制系统组成一个域,通过中央网关与其他域隔离开,使其受到攻击的可能性减小,同时加强这个域的网络安全防护,这也产生了对域控制器的需求。
7)平台化、标准化的需求。集中式的架构相比分布式的架构,需要DCU的处理单元拥有更强的多核、更大的计算能力,而域里其它的处理器相对就可以减少性能和资源。各种传感器、执行器可以成为单独的模块,这样可以更方便实现零部件的标准化。DCU能够接入不同传感器的信号并对信号进行分析和处理,这样就可以方便地扩展外接的传感器,这样就能够更加适应不同需求的开发,从而为平台化铺平道路。
总结来说,随着车载传感器数量越来越多,传感器与ECU一一对应使得车辆整体性能下降,线路复杂性也急剧增加,同时分布式ECU架构在自动驾驶功能实现上面临诸多技术瓶颈,此时DCU和MDC应运而生,以更强大的中心化架构逐步替代了分布式架构。
今生:DCU走上舞台
域控制器将车身划分为多个功能模块。所谓“域”就是将汽车电子系统根据功能划分为若干个功能块,每个功能块内部的系统架构由域控制器为主导搭建。各个域内部的系统互联仍可使用现如今十分常用的CAN和FlexRay通信总线。而不同域之间的通讯,则需要由更高传输性能的以太网作为主干网络承担信息交换任务。对于功能域的具体划分,不同整车厂会有自己的设计理念,图1给出了一种可能的划分方法。在每个功能域中,域控制器处于绝对中心,它们需要强大的处理功率和超高的实时性能以及大量的通信外设。

域控制器网络拓扑架构更为集中。域控制器的概念最早是由以博世,大陆,德尔福为首的Tier1提出,为了解决信息安全,以及ECU瓶颈的问题。根据汽车电子部件功能将整车划分为车身与便利系统(Body&Convenience)、车用资讯娱乐系统(Infotainment)、底盘与安全系统(chassisandsafety)、动力系统(powertrain),以及高级辅助驾驶系统(ADAS)等五个大域,大域下面包含各种子域。每个域或子域都有对应的域控制器DCU和各种ECU,所有这些构成了汽车电子电气架构的网络拓扑。利用处理能力更强的多核CPU/GPU芯片相对集中的控制每个域,以取代目前分布式电子电气架构。
域控制器降低原分布式ECU功能复杂度。域控制器因为有强大的硬件计算能力与丰富的软件接口支持,使得更多核心功能模块集中于域控制器内,系统功能集成度大大提高,这样对于功能的感知与执行的硬件要求降低。但是,域控制器的出现并不代表底层硬件ECU的大规模消失,很多ECU的功能会被弱化,大部分传感器也可以直接传输数据给域控制器,或把数据初步处理后给域控制器,很多复杂计算都可以在域控制器里完成,甚至大部分控制功能也在域控制器里完成,原有ECU很多只需执行域控制器的命令,也就是说,外围零件只关注本身基本功能,而中央域控制器关注系统级功能实现。此外,数据交互的接口标准化,会让这些零部件变成标准零件,从而降低这部分零部件开发/制造成本。
域控制器的分类——经典的五域划分
核心:以博世经典的五域分类拆分整车为动力域、底盘域、座舱域/智能信息域、自动驾驶域和车身域,这五大域控制模块较为完备的集成了L3及以上级别自动驾驶车辆的所有控制功能。
1.动力域
动力域控制器是一种智能化的动力总成管理单元,借助CAN/FLEXRAY实现变速器管理、引擎管理、电池监控、交流发电机调节。其优势在于为多种动力系统单元计算和分配扭矩、通过预判驾驶策略实现CO2减排、通信网关等,主要用于动力总成的优化与控制,同时兼具电气智能故障诊断、智能节电、总线通信等功能。
未来主流的系统设计方案如下:
1)以Aurix2G为核心的智能动力域控制器软硬件平台,对动力域内子控制器进行功能整合,集成ECU的基本功能,集成面向动力域协同优化的VCU,Inverter,TCU,BMS和DCDC等高级的域层次算法。
2)以ASIL-C安全等级为目标,具备SOTA,信息安全,通讯管理等功能。
3)支持的通讯类型包括CAN/CAN-FD,GigabitEthernet并对通讯提供SHA-256加密算法支持。
4)面向CPU\GPU发展,需要支持AdapativeAutosar环境,主频需要提高到2G,支持Linux系统,目前支持POSIX标准接口的操作系统。
2020年1月16日,由合众汽车工程研究院副院长邓晓光带领团队开发的动力域控制器搭载哪吒汽车成功,并成功一次通过搭载车辆测试,标志着合众PDCS动力域控制器正式进入量产应用阶段。合众动力域控制器系统采用英飞凌多核处理器200MHz主频,具备DSP数字信号处理及浮点运算能力,是HozonPDCS的高速处理器。同时,HozonPDCS三核并带锁步核的主芯片实现更高功能安全,按照ASILC功能安全等级开发,仅次于飞机的D级,有效保证用户出行安全。V模型开发,每一步可验证,软件失效率低于0.3%,兼具AUTOSAR架构+MBD建模与控制,有效提高软件可靠性。可实时监控电控系统,智能协调及监控动力输出,提升驾控性能及安全。同时保护电池安全,根据系统需求,同步优化能量分配、增加续航里程。
2.底盘域
底盘域是与汽车行驶相关,由传动系统、行驶系统、转向系统和制动系统共同构成。传动系统负责把发动机的动力传给驱动轮,可以分为机械式、液力式和电力式等,其中机械式传动系统主要由离合器、变速器、万向传动装置和驱动桥组成、液力式传动系统主要由液力变矩器、自动变速器、万向传动装置和驱动桥组成;行驶系统把汽车各个部分连成一个整体并对全车起支承作用,如车架、悬架、车轮、车桥都是它的零件;转向系统保证汽车能按驾驶员的意愿进行直线或转向行驶;制动系统迫使路面在汽车车轮上施加一定的与汽车行驶方向相反的外力,对汽车进行一定程度的强制制动,其功用是减速停车、驻车制动。
声音 | 莱比特矿池江卓尔:比特币涨至7000美元之前 无人考虑压力位是否直接突破7000:5月15日,莱比特矿池江卓尔在微博表示,“在熊市中拼杀出来,活到今天的期货交易者和分析师们,必然是有浓厚的熊市思维的,这也是帮他们活过来的原因。”同时其还表示,这些人的策略告诉其5800的确是压力位,6200是压力位,6600也是 7000更是。 但在比特币涨到七千之前,都没人考虑过会不会直接突破七千。[2019/5/15]
智能化推动线控底盘发展。随着汽车智能化发展,智能汽车的感知识别、决策规划、控制执行三个核心系统中,与汽车零部件行业最贴近的是控制执行端,也就是驱动控制、转向控制、制动控制等,需要对传统汽车的底盘进行线控改造以适用于自动驾驶。线控底盘主要有五大系统,分别为线控转向、线控制动、线控换挡、线控油门、线控悬挂,线控转向和线控制动是面向自动驾驶执行端方向最核心的产品,其中又以制动技术难度更高。
线控制动是未来汽车制动系统的发展趋势。汽车制动系统经历了从机械到液压再到电子的发展过程,未来将向线控制动方向发展。L2时代的线控制动可以分为燃油车、混动、纯电三大类,燃油车基本都采用ESP(ESC)做线控制动。混动车基本都采用高压蓄能器为核心的间接型EHB。纯电车基本都采用直接型EHB,以电机直接推动主缸活塞。在汽车智能化的趋势下,考虑到对L3及以上等级自动驾驶汽车来说制动系统的响应时间非常关键,而线控制动执行信息由电信号传递,响应相对更快,刹车距离更短,是未来汽车智能化的长期趋势。
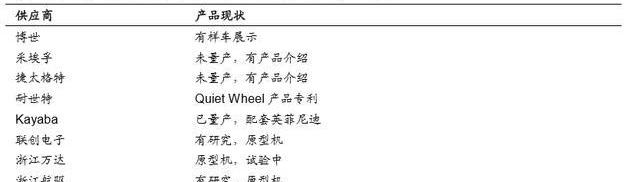
线控制动系统可以分为液压式线控制动EHB、机械式线控制动EMB两种类型。EHB系统由于具有备用制动系统,安全性较高,因此接受度更高,是目前主要推广量产的方案。由于缺少备用制动系统且缺少技术支持,短期内很难大批量应用,是未来发展的方向。
线控制动是汽车技术门槛较高的领域,全球主要的线控制动厂家是博世、大陆、采埃孚等零部件企业。EHB国外厂商技术发展已经比较成熟,但严格意义讲还不适应于L4自动驾驶,国内此项技术在努力追赶;EMB还处在研究阶段,目前看较难有突破。其中,博世的iBooster是典型的直接型EHB。iBooster通常与ESP配套使用,ESP在iBooster失效时顶上。不过因为ESP也是一套电液压系统,也有可能失效,且ESP在设计之初只是为AEB类紧急制动场景设计的,不能做常规制动,所以博世在第二代iBooster推出后,着手针对L3和L4设计了一套线控制动系统,这就是IPB+RBU。
智能化的发展催促线控转向的产生。转向系统从最初的机械式转向系统发展为液压助力转向系统,之后是电控液压助力转向系统和电动助力转向系统。目前乘用车上以EPS为主流,商用车以HPS为主流,EHPS在大型SUV上比较常见,其余领域比较少见。智能化的趋势下,L3及以上等级智能汽车要求部分或全程会脱离驾驶员的操控,对于转向系统控制精确度、可靠性要求更高高,催促线控转向的产生。
线控转向系统是指,在驾驶员输入接口和执行机构之间是通过线控连接的,即在它们之间没有直接的液力或机械连接。线控转向系统是通过给助力电机发送电信号指令,从而实现对转向系统进行控制。SBW的发展与EPS一脉相承,其系统相对于EPS需要有冗余功能。目前SBW系统有两种方式:1)取消方向盘与转向执行机构的机械连接,通过多个电机和控制器来增加系统的冗余度;2)在方向盘与转向执行机构之间增加一个电磁离合器作为失效备份,来增加系统的冗余度。
从厂商角度看,全球EPS厂家以博世、捷太格特、NSK、耐世特等国际巨头为主,其中日本厂家多以精密轴承起家,向下游拓展到EPS领域;美国厂家则是tier1厂家,横向扩展到EPS领域;欧洲厂家类似美国厂家,但是在上游的精密机械加工领域远比美国要强。相比之下国内企业主要有三家,包括株洲易力达、湖北恒隆和浙江世宝,但是规模都比较小,技术较落后。

线控转向系统由于技术、资本、安全等各方面的要求高,技术基本掌握在海外的零部件巨头手中,进入壁垒非常高。目前联创电子、浙江万达等国内企业开始涉足SBW领域,国内企业未来有望开拓SBW新业务。
3.座舱域/智能信息域
传统座舱域是由几个分散子系统或单独模块组成,这种架构无法支持多屏联动、多屏驾驶等复杂电子座舱功能,因此催生出座舱域控制器这种域集中式的计算平台。智能座舱的构成主要包括全液晶仪表、大屏中控系统、车载信息娱乐系统、抬头显示系统、流媒体后视镜等,核心控制部件是域控制器。座舱域控制器通过以太网/MOST/CAN,实现抬头显示、仪表盘、导航等部件的融合,不仅具有传统座舱电子部件,还进一步整合智能驾驶ADAS系统和车联网V2X系统,从而进一步优化智能驾驶、车载互联、信息娱乐等功能。
智能驾驶辅助系统的构成主要包括感知层、决策层和执行层三大核心部分。感知层主要传感器包括车载摄像头、毫米波雷达、超声波雷达、激光雷达、智能照明系统等,车辆自身运动信息主要通过车身上的速度传感器、角度传感器、惯性导航系统等部件获取。而通过座舱域控制器,可以实现“独立感知”和“交互方式升级”。一方面,车辆具有“感知”人的能力。智能座舱系统通过独立感知层,能够拿到足够的感知数据,例如车内视觉、语音以及方向盘、刹车踏板、油门踏板、档位、安全带等底盘和车身数据,利用生物识别技术,来综合判断驾驶员的生理状态和行为状态,随后根据具体场景推送交互请求。另一方面,车内交互方式从仅有“物理按键交互”升级至“触屏交互”、“语音交互”、“手势交互”并存的状态。此外,多模交互技术通过融合“视觉”、“语音”等模态的感知数据,做到更精准、更智能、更人性化的交互。
座舱电子域控制器领域,采用伟世通SmartCore方案的厂家最多,其次就是Aptiv的ICC方案。其中伟世通的SmartCore旨在集成信息娱乐、仪表板、信息显示、HUD、ADAS和网联系统。据伟世通称,它具有很高的扩展性和网络安全的程度,可实现独立的功能域。而Aptiv的集成驾驶舱控制器使用最新的英特尔汽车处理器系列,可支持到四个高清显示器,可扩展,并且可以从入门级覆盖到高端产品。ICC在图形和计算能力方面提供了实质性的改进,ICC使用单芯片中央计算平台驱动多个驾驶舱显示器,包括仪表、HUD和中央堆栈等。
4.自动驾驶域
应用于自动驾驶领域的域控制器能够使车辆具备多传感器融合、定位、路径规划、决策控制的能力,通常需要外接多个摄像头、毫米波雷达、激光雷达等设备,完成的功能包含图像识别、数据处理等。不再需要搭载外设工控机、控制板等多种硬件,并需要匹配核心运算力强的处理器,从而提供自动驾驶不同等级的计算能力的支持,核心主要在于芯片的处理能力,最终目标是能够满足自动驾驶的算力需求,简化设备,大大提高系统的集成度。
算法实现上,自动驾驶汽车通过激光雷达、毫米波雷达、摄像头、GPS、惯导等车载传感器来感知周围环境,通过传感器数据处理及多传感器信息融合,以及适当的工作模型制定相应的策略,进行决策与规划。在规划好路径之后,控制车辆沿着期望的轨迹行驶。域控制器的输入为各项传感器的数据,所进行的算法处理涵盖了感知、决策、控制三个层面,最终将输出传送至执行机构,进行车辆的横纵向控制。
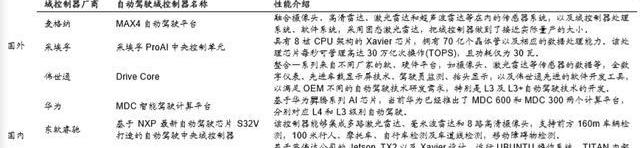
由于要完成大量运算,域控制器一般都要匹配一个核心运算力强的处理器,能够提供自动驾驶不同级别算力的支持,目前业内有NVIDIA、华为、瑞萨、NXP、TI、Mobileye、赛灵思、地平线等多个方案。但中间也会有一些共性,比如在自动驾驶系统中,算力需求最高的当属图像识别部分,其次是多传感器的数据处理,以及融合决策。以奥地利TTTech公司的zFAS为例,这款基于德尔福提供的域控制器设计的产品,内部集成了英伟达TegraK1处理器、Mobileye的EyeQ3芯片,各个部分分处理不同的模块。TegraK1用于做4路环视图像处理,EyeQ3负责前向识别处理。
动态 | 波音公司想要利用区块链技术为无人机创造交通管理系统:波音公司表示,想要利用人工智能、区块链等技术为无人机创建一个交通管理系统。波音公司首席技术官格雷格?海斯洛普(Greg Hyslop)今天在一份声明中表示:“我们正处于一个技术进步和社会趋势汇聚到一起的历史时刻,需要大胆的解决方案,以及一种不同的旅行方式。”[2018/7/17]
在自动驾驶技术快速发展背景下,国内外越来越多的Tier1和供应商都开始涉足自动驾驶域控制器。
5.车身域
随着整车发展,车身控制器越来越多,为了降低控制器成本,降低整车重量,集成化需要把所有的功能器件,从车头的部分、车中间的部分和车尾部的部分如后刹车灯、后位置灯、尾门锁、甚至双撑杆统一连接到一个总的控制器里面。车身域控制器从分散化的功能组合,逐渐过渡到集成所有车身电子的基础驱动、钥匙功能、车灯、车门、车窗等的大控制器。
车身域控制系统综合灯光、雨刮洗涤、中控门锁、车窗控制;PEPS智能钥匙、低频天线、低频天线驱动、电子转向柱锁、IMMO天线;网关的CAN、可扩展CANFD和FLEXRAY、LIN网络、以太网接口;TPMS和无线接收模块等进行总体开发设计。车身域控制器能够集成传统BCM、PEPS、纹波防夹等功能。
从通信角度来看,存在传统架构-混合架构-最终的VehicleComputerPlatform的演变过程。这里面通信速度的变化,还有带高功能安全的基础算力的价格降低是关键,未来在基础控制器的电子层面兼容不同的功能慢慢有可能实现。
车身域电子系统领域不论是对国外还是国内企业,都尚处于拓荒期或成长初期。国外企业在如BCM、PEPS、门窗、座椅控制器等单功能产品上有深厚的技术积累,同时各大外国企业的产品线覆盖面较广,为他们做系统集成产品奠定了基础。而大多数国内企业生产的产品相对低端,且产品线单一,要从整个车身域重新布局和定义系统集成的产品就会有相当的难度。
域控制器产业链机遇
核心:从生产流程来看,汽车电子控制器产业链主要经历了:晶圆生产、封装测试及系统应用。上游核心产品芯片,决定了域控制器的核心计算能力,芯片设计层面主要由海外垄断,晶圆代工和封装测试层面大部分国产化半导体龙头企业具备实力;中游核心产品MCU,PCB板、无源器件;下游控制器总成厂商主要是全球零部件巨头企业领先,近年来国内部分上市公司和初创企业逐渐实现了产品研发和订单斩获。
域控制器硬件拆解
域控制器的底层硬件仍然是汽车电子控制单元,只是相较于ECU而言,DCU的处理器算力更强、接口数目更多,软件方法更新。但DCU和ECU外观相似,硬件结构基本一致。

ECU和DCU硬件结构大同小异。如果拆解ECU和DCU后会发现,二者都是由印刷电路板、密封性金属外壳、支架、散热组件等构成。大部分ECU电路结构大同小异,控制功能的变化主要依赖于软件及输入输出模块的变化,随控制系统完成任务的不同而存在差异。
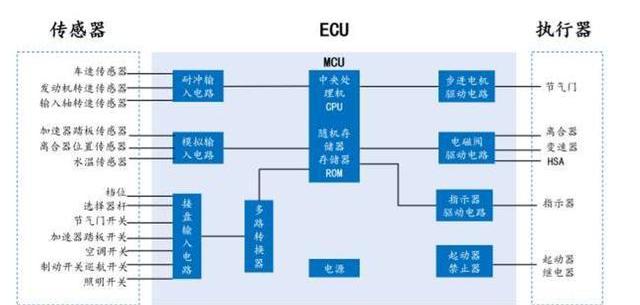
汽车电子控制系统主要包括传感器-ECU-执行器。汽车电子控制系统包括硬件和软件两部分,硬件有电子控制单元及其接口、传感器、执行机构、显示机构等;软件存储在ECU中支配电子控制系统完成实时测控功能。
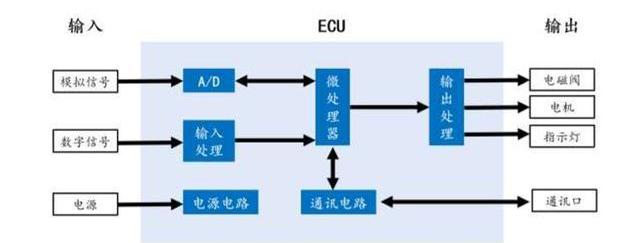
汽车电子控制系统工作原理:输入-转换-处理-输出。
在输入处理电路中,ECU的输入信号主要有三种形式,模拟信号、数字信号(包括开关信号)、脉冲信号。模拟信号通过A/D转换为数字信号提供给微处理器。控制系统要求模数信号转换具有较高的分辨率和精度(>10位)。为了保证测控系统的实时性,采样间隔一般要求小于4ms。数字信号需要通过电平转换,得到计算机接受的信号。对超过电源电压、电压在正负之间变化、带有较高的振荡或噪声、带有波动电压等输入信号,输入电路也对其进行转换处理。
在微处理器中,首先完成传感器信号的A/D转换、周期脉冲信号测量和其它有关汽车行驶状态信号的输入处理,然后计算并控制所需的输出值,按要求适时地向执行机构发送控制信号。过去微处理器多数是8位和l6位的,也有少数采用32位的。现在多用16位和32位机。
在输出电路中,微处理器输出的信号往往用作控制电磁阀、指示灯、步进电机等执行件。微处理器输出信号功率小,使用+5v的电压,汽车上执行机构的电源大多数是蓄电池,需要将微处理器的控制信号通过输出处理电路处理后再驱动执行机构。
在电源电路中,传统车的ECU一般带有电池和内置电源电路,以保证微处理器及其接口电路工作在+5v的电压下。即使在发动机启动工况等使汽车蓄电池电压有较大波动时,也能提供+5v的稳定电压,从而保证系统的正常工作,而电动汽车一般由蓄电池供电。
ECU就是由MCU和外围电路组成。ECU作为汽车电子控制系统的核心部分,是嵌入式系统装置,一般由中央处理机,存储器,扩展IO口,CAN/LIN总线收发控制器,A/DD/A转换口,PWM脉宽调制,PID控制,电压控制,看门狗,散热片,和其他一些电子元器件组成,特定功能的ECU还带有诸如红外线收发器、传感器、DSP数字信号处理器,脉冲发生器,脉冲分配器,电机驱动单元,放大单元,强弱电隔离等元器件。整块电路板设计安装与一个铝质盒内,通过卡扣或者螺钉方便安装于车身钣金上。ECU一般采用通用且功能集成,开发容易的CPU;软件一般用C语言来编写,并且提供了丰富的驱动程序库和函数库,有编程器,仿真器,仿真软件,还有用于calibration的软件。简单来说,ECU就是由微控制器和外围电路组成。微控制器-MCU,又称单片机,就是在一块芯片上集成了中央处理机,存储器和输入/输出接口的单元。ECU的主要部分是MCU,而核心部件是CPU。
域控制器产业链梳理
1)硬件部分,汽车电子控制器硬件的核心在于微控制器。MCU=CPU+存储+接口单元,CPU即芯片的一种类别。
从生产流程来看,汽车电子控制器产业链主要经历了:晶圆生产、封装测试及系统应用。晶圆的原始材料是硅,通过纯化、融解、注入籽晶、拉出成单晶硅晶棒、硅晶棒再经过切段,滚磨,切片,倒角,抛光,激光刻,包装后,即成为积体电路工厂的基本原料——硅晶圆片,即晶圆,也就是芯片制作的原料;芯片厂收到晶圆后,通过使用化学、电路光刻制版技术,将晶体管蚀刻到硅晶圆之上,蚀刻完成后将单个的芯片一块块地从晶圆上切割下来,并进行封装测试,这一步芯片制作完成;将发去下游的控制器制造厂SMT产线上,进行PCBA。将需要的各种芯片贴装到电路板上,最后进行Housing。
总结来看,汽车电子控制器产业链上游在于芯片制造,中游为智能控制器设计制造,下游是汽车电子终端产品。产业链企业从上至下包括芯片设计方、晶圆制造方、外包封测企业、垂直整合芯片制造商、无源器件、电路板、MCU厂商、域控制器厂商。

以色列将区块链技术用于政务平台开放、无人机管控等多个领域:旨在减少欺诈和腐败的区块链应用正被以色列政界和商界广泛关注。以色列政府资助并与企业、教育机构合作,区块链协会搭起了这些团体在区块链技术方面互动的桥梁。据悉,区块链平台也将无人驾驶飞机运营商,无人机制造商和监管机构汇集在一起,提供一个真实的来源。无人机在飞行过程中捕获的飞行路径数据可以上传到同一个共享分布式账本,并在交互式地图上以视觉形式呈现。[2018/3/19]
上游芯片端——域控制器上游的芯片直接反映了技术应用和产品性能,国内在晶圆代工和封装测试方面都有一定的积累,但在芯片设计方面尚较为空白,而这正是国内外汽车控制器差距所在。
中游MCU端——域控制器中游环节主要是微控制单元,又称单片微型计算机或单片机,是把CPU的频率与规格做适当缩减,并将内存、计数器、USB、A/D转换、UART、PLC、DMA等周边接口,甚至LCD驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。MCU可以视为一个小型的控制器,大多数ECU会基于多个MCU、PCB板进行更为复杂的控制功能设计。
中游PCB端——PCB是汽车控制器内部元器件电气连接的载体,主要材料是覆铜板,当前国产化率较高,中国PCB厂商在全球占据重要地位。

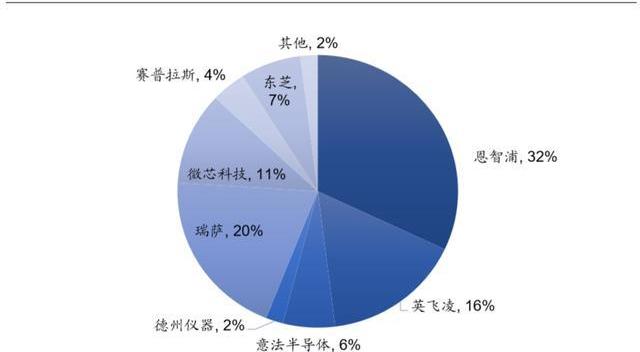
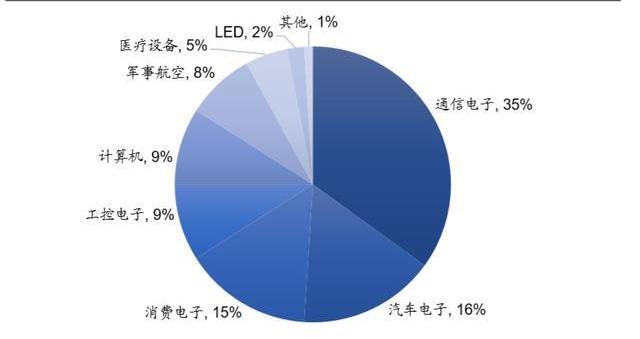
车用PCB板是PCB行业的重要应用,2017年中国PCB市场下游应用最多的三个领域分别是通信电子、汽车电子、消费电子,分别占据了35%、16%和15%的应用比例。汽车电动化、智能化、网联化将加速汽车电子化的进程。Prismark预测2018至2023年汽车智能化中最重要的ADAS年均成长率为17%。根据N.T.Information报告,2017年全球汽车电子产值约1950亿美元,每车的汽车电子价值占比预计为30%,到2030年每车的汽车电子价值占比预计增加到50%,汽车电子化程度的不断加深将增加更多的高散热、高多层、高密度PCB的需求。
国内PCB核心厂商中,汽车业务比例较高的主要有依顿电子、沪电股份、景旺电子、世运电路和崇达技术,车用PCB业务比例分别达到了39%、36%、23%、23%和12%。
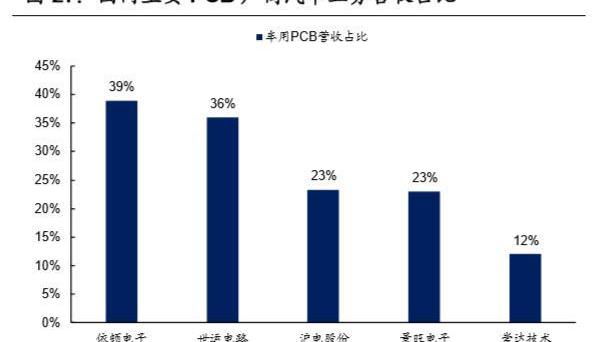
下游客户包括了法雷奥、德尔福、博世、大陆、小糸等国际主流TIER1和特斯拉等国际整车企业。

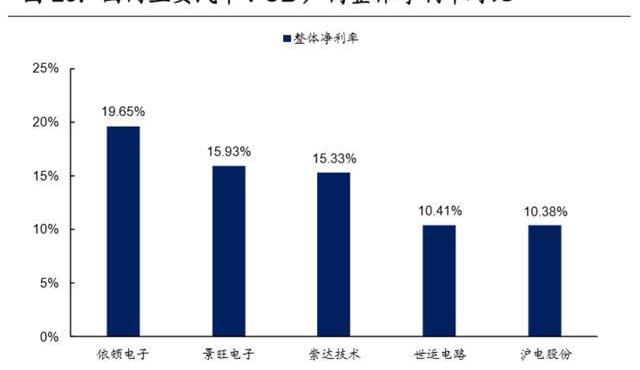
盈利能力来看,景旺电子、依顿电子和崇达技术三家PCB企业相对较为领先,整体毛利率均在30%以上,整体净利率均在15%以上。
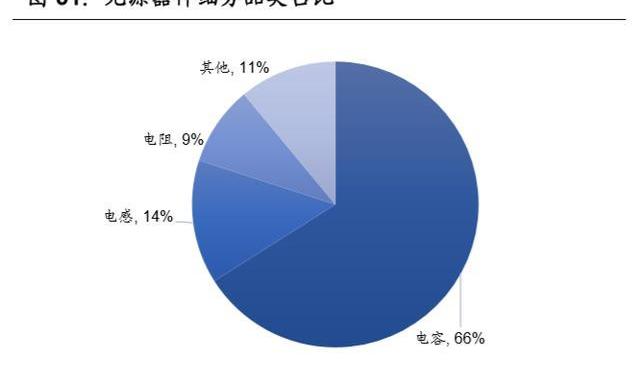
中游无源器件端——无源器件分为RCL和射频元器件两大类,其中RCL约占无源器件的90%,在RCL中,电容、电阻和电感是三种主要类型。电容的主要功能是旁路、去耦、滤波和储能,产值约占无源器件整体的66%;电感的主要功能是滤波、稳流和抗电磁干扰,产值占比约14%;电阻的主要功能是分压、分流、滤波和阻抗匹配,产值占比约9%
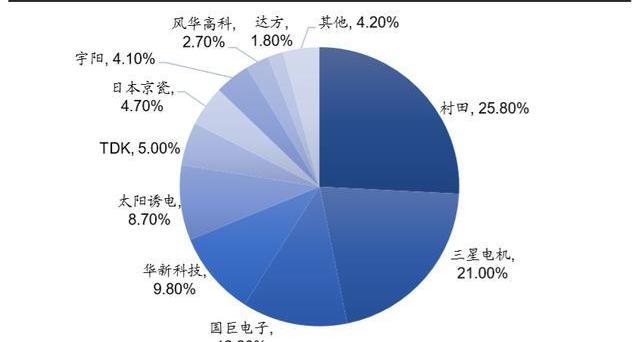
电容器主要包括陶瓷电容、铝电解、钽电解、薄膜电容等,其中陶瓷电容可以做到更小的体积、更大的电压范围,更低廉的价格,在整个电容器领域占比约50%,陶瓷电容器中又以MLCC为主导。MLCC按出货量排名,全球MLCC厂商包括日本村田制作所、韩国三星电机、中国国巨、日本太阳诱电、TDK等;而在,MLCC厂商主要有风华高科、火炬电子、三环集团、宇阳及鸿远电子等。
下游域控制器总成端——域控制器总成的领先企业主要包括博世、电装、大陆、TTTech、Aptiv、伟世通等国际TIER1巨头,其中奥地利企业TTTech的自动驾驶域控制器和奥迪A8和上汽进行深度合作,伟世通的座舱域控制器已经在吉利、奔驰等车企进行装配量产;国内以德赛西威为代表的零部件企业在座舱域和自动驾驶域方面近年来也和部分造车新势力企业建立了配套关系,其余的域控制器布局企业还有华为、东软睿驰、合众汽车、布谷鸟、百度、环宇智行、知行科技、海高汽车、领目科技等等。

在自动驾驶域控制器领域,预计未来Tier1与整车厂之间将采取两种合作方式。
其一,Tier1负责中间层以及硬件生产,整车厂负责自动驾驶软件部分。Tier1的优势在于以合理的成本将产品生产出来并且加速产品落地,因此整车厂和Tier1进行合作生产方式是必然,前者负责自动驾驶软件部分,后者负责硬件生产、中间层以及芯片方案整合,比如德赛西威IPU03S。
其二,Tier1自己与芯片商合作,做方案整合后研发中央域控制器并向整车厂销售,例如大陆ADCU、采埃孚ProAI、麦格纳MAX4。
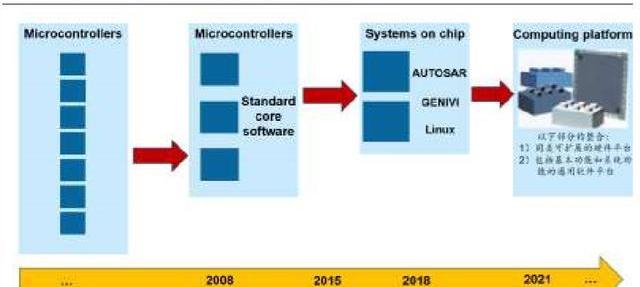
软件部分,软件算法是汽车电子控制器的另外一个核心。汽车软件系统包括系统软件和应用软件两大部分。
系统软件包括操作系统和一系列实用程序,一般由处理器芯片厂家提供。
应用软件包括:数据采集与过程监控模块、数据处理模块、控制算法模块、执行机构控制模块、故障自我诊断模块。
随着汽车智能化的不断提高,软件系统越来越复杂,整个汽车软件代码行数在1000万以上,软件价值占比不断上升,开发成本占汽车电子系统总成本的一半以上,重要性凸显。
域控制器带来的硬件升级和附加软件机遇
上一节我们梳理了汽车电子控制器产业链,从硬件上来看,决定各类控制器功能的核心在于芯片端,域控制器相较于普通ECU而言,
在硬件层面:域控制器芯片端发生了1)从原有的16Bit单核处理器升级到多核处理器;2)算力从低到高升级;3)芯片功能从标准到定制芯片升级。此外还有更多的输入接口,更为合理的结构设计、散热与电磁兼容性设计。
1)芯片从单核升级到多核处理器
十年前,大多数汽车电子控制单元一般为16Bit单核处理器,一辆汽车上平均MCU个数不足10个,而现在一辆车的MCU超过了100个,高端汽车的MCU甚至达到了300个。MCU数量迅速增长下,会带来很多问题。智能汽车ADAS功能越来越复杂,ECU性能面临瓶颈。
昨日活跃的无人驾驶和区块链板块杀跌迅猛:早间开盘,三大指数集体低开,昨日活跃的无人驾驶和区块链板块杀跌迅猛,资金的风险偏好有所降低,兑现欲望较为强烈,随后白酒和保险板块略有拉升,带动沪指回暖,盘面上看,今日市场个股跌多涨少,情绪较为谨慎。板块方面地热、白酒板块领涨,盘中房地产(嘉凯城)异动拉升。区块链、有色钴板块领跌。[2018/1/9]
域控制器要想利用其强大的运算处理能力为庞大的汽车软件集中运算提供帮助,就需要用到复杂的多核电控单元。对ECU框架进行优化,根据汽车电子部件功能将整车划分为动力总成,车辆安全,车身电子,智能座舱和智能驾驶等几个域,利用处理能力更强的多核CPU/GPU芯片相对集中的去控制每个域,以取代目前的分布式汽车电子电气架构。
2)芯片算力从低到高升级
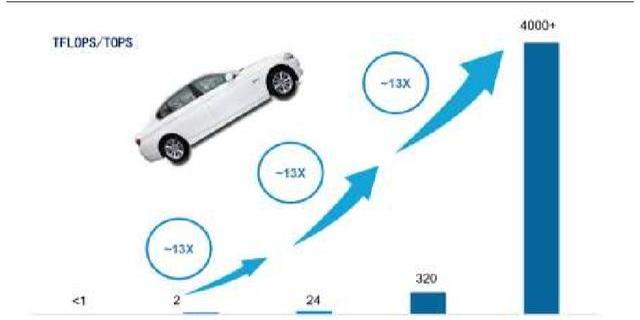
随着汽车智能化的发展,座舱域和智能驾驶域对汽车处理器性能的要求越来越高。根据地平线的数据,自动驾驶等级每提高一级,算力就增加一个数量级;L2级别需要2个TOPS的算力,L3需要24个TOPS的算力,L4为320TOPS,L5为4000+TOPS。
3)芯片功能从标准到定制化升级
汽车计算芯片主要包括三种典型产品:ASSP、ASIC和FPGA。当前主流的域控制器处于多核CPU/GPU芯片阶段,随着人工智能计算的快速发展,传统的CPU、GPU已经开始难以满足越来越多新的需求,在能效上也处于劣势。而半定制的FPGA和定制型的ASIC将迎来高速的发展。
第一阶段:从以CPU为核心的ECU转变为以GPU为核心的智能辅助驾驶芯片。
汽车电子发展的初期阶段,ECU主要是用于控制发动机工作,为保证传感器ECU控制器回路的稳定性,采用ECU与传感器对应的分布式架构。后来随着车辆的电子化程度逐渐提高,ECU占领了整个汽车,从防抱死制动系统、4轮驱动系统、电控自动变速器、主动悬架系统、安全气囊系统,到现在逐渐延伸到了车身各类安全、网络、娱乐、传感控制系统等。
随着汽车电子化的发展,车载传感器数量越来越多,传感器与ECU一一对应使得车辆整体性下降,线路复杂性也急剧增加,此时DCU和MDC等更强大的中心化架构逐步替代了分布式架构。将整车划分为动力总成,车辆安全,车身电子,智能座舱和智能驾驶等几个域,利用多核CPU/GPU芯片相对集中的去控制每个域。
GPU和CPU最大的区别是设计结构及不同结构形成的不同功能。CPU的逻辑控制功能强,可以进行复杂的逻辑运算,并且延时低,可以高效处理复杂的运算任务。而GPU逻辑控制和缓存较少,使得每单个运算单元执行的逻辑运算复杂程度有限,但并列大量的计算单元,可以同时进行大量较简单的运算任务。此外,CPU的核心数量只有几个,每个核都有足够大的缓存和足够多的数字和逻辑运算单元,并辅助很多复杂的计算分支。而GPU的运算核心数量则可以多达上百个,每个核拥有的缓存大小相对小,数字逻辑运算单元也少而简单。

第二阶段:从ASSP到FPGA、ASIC。
摩尔定律使AI芯片性能增加速度越来越饱和,起作用的过程也正在放缓。用于通用计算的CPU和用于高性能计算的GPU在AI计算能效上也开始处于劣势,下一代计算越来越需要异构系统,传统的CPU、GPU已经开始难以满足越来越多的新的需求,半定制的FPGA和定制型的ASIC被各大AI公司青睐。
其中ASIC具备体积小、功耗低、计算性能高、计算效率高等优势,大公司如谷歌、阿里也在出芯片,众多创业公司都在做各种各样的ASIC,希望在特定的定制领域提供一些场景和应用。但由于ASIC在很多领域都还没有标准的算法,需要针对特定算法进行设计,不仅不能修改,而且生产周期长达一至两年。故在全定制的自动驾驶芯片成熟之前,半定制的FPGA是较佳选择。

FPGA的核心优点在于可编程灵活性高、开发周期短,FPGA可随意定制内部逻辑的阵列,并且可以在用户现场进行即时编程,以修改内部的硬件逻辑,从而实现任意逻辑功能。形象点来说,传统的ASIC等于一张出厂时就写有数据且不可擦除的CD,用户只需要放到CD播放器就可以看到起数据或听到音乐;而FPGA是一张出厂时的空白的CD,需要用户自己使用刻录机烧写数据内容到盘里,并且还可以擦除上面的数据,反复刻录。
在软件层面:域控制器1)形成了多核异构集成平台;2)感知层面融合算法和交叉验证;3)支持更灵活高速的通信网络;4)新建高级网关;5)Autosar架构;6)安全机制要求更高;7)支持OTA升级。
1)各软件组件的集成平台:基于复杂接口、更高算力和多核处理器芯片,域控制器建立了一个集成平台,兼AI感知、融合、决策控制一体化平台型架构,灵活支持客户定制化的系统配置、传感器组合、通讯接口与协议等。
2)多传感器融合算法:感知层面采用多冗余与交叉验证机制,保证目标检出可信度;决策层面采用先进状态估计与判断算法,准确判断动态场景,在边缘处理器侧即可实现原始数据层面的高效融合与处理。
3)车内通信网络及网关升级:当前CAN,LIN代表着传统汽车车内通信网络,但CAN最大1MB/s的带宽以及非确定性的Message传输时间,在高算力和高度融合的域控制器阶段有所不足,未来更高速、更开放的以太网有望取代CAN成为骨干网络,和CAN等传统车载网络在较长的一段时间内共存。也就是说,①在车身控制域内部,各部件通过CAN、LIN沟通实现数据共享;②在娱乐子网中,娱乐域控制器与其子部件的通信将通过以太网实现;③当一个域需要与其他域交换信息时则经由网关、以太网路由实现。
4)AUTOSAR标准软件架构:AUTOSAR是全球各大汽车整车厂、汽车零部件供应商、汽车电子软件系统公司联合拟定的一个符合汽车电子软件开发的、开放的以及标准化的软件架构。该架构旨在改善汽车电子系统软件的更新与交换,同时更方便有效地管理日趋复杂的汽车电子软件系统。AUTOSAR规范的运用使得不同结构的电子控制单元的接口特征标准化,应用软件具备更好的可扩展性以及可移植性,能够实现对现有软件的重用,大大降低了重复性工作,缩短开发周期。
5)系统安全升级:ISO26262是汽车电气/电子系统相关的“功能安全”国际标准,于2011年11月正式发布第一版本,于2018年12月发布修订后的第二版。ISO26262采用车辆安全完整性等级来判断系统的功能安全程度,ASIL由ASILA、ASILB、ASILC及ASILD四个等级组成,ASIL等级越高表示系统的功能安全评估越严格,相应的表示系统正确执行安全功能,或者说的避免该功能出错的概率越高,即系统的安全可靠性越高。域控制器作为范围内核心计算平台,牵一发而制全身,功能安全要求更高,功能安全目标多数在ASILD等级。
6)更为高效的OTA升级:模块越少、系统越统一越容易实现整车OTA,域控制器更为集中的EEA架构将车内各个分散的ECU部件的控制功能集成在一个DCU中,仅对DCU进行控制功能进行更新升级完成OTA,同时规避了各ECU的不同传输协议和兼容性风险,减少了每个ECU进行安全性确认防篡改的工作量。特斯拉作为车辆OTA升级的鼻祖,一定程度上就是得益于其DCU组件的电子电气架构。
域控制器的未来
域控制器是车辆OTA升级的基石
OTA技术从PC/手机延伸到汽车。OTA英文全称Over-the-AirTechnology,亦即“空中传输技术”或“远程升级”,是指通过服务器、移动通信网络和终端等的网络连接,最终实现终端内存储数据的更新,进而改善终端的功能和服务的技术。OTA技术最早应用在PC机上,后来广泛应用在移动手机行业,与PC、移动手机在短短二三十年广泛应用OTA技术不同,汽车行业由于其复杂的分布式电子电气架构及安全考量的原因,并没有很快接受这项新技术,近几年随着电子电气架构的升级才逐渐在汽车行业里普及。
当前汽车OTA又分为SOTA和FOTA两种升级方式。早期的汽车OTA自TBOX开始,通过内置SIM卡的TBOX为车主用户提供如道路救援、车厂客服、110紧急通话、远程车况查询、远程控制车门、车窗和空调开关等网络服务。随后一些车企开始针对IVI如导航地图、音乐等升级进行OTA升级。这都是汽车OTA的早期应用,针对应用程序等软件的升级。发展到现阶段,汽车OTA已经不仅仅满足于软件升级,固件升级成为汽车OTA升级的一大趋势。
SOTA、车载地图、人机交互界面等功能。
FOTA又称固件更新,用户可以通过特定的刷新程序进行FOTA升级,影响的是动力系统、电池管理系统等。FOTA可以深层次改变汽车控制系统、管理系统及性能表现,甚至还能通过预留的硬件,通过后期的OTA开放一些新功能。
特斯拉依靠其集中式电子电气结构率先实现整车OTA升级。特斯拉是整车OTA升级的开创企业,它不仅可以通过OTA将软件升级发送到车辆内的车载通讯单元,更新车载信息娱乐系统内的地图和应用程序以及其他软件,还可以直接将软件增补程序传送至有关的电子控制单元,以实现安全、可靠的固件功能升级。具体思路就是,在汽车上预先搭载可能多年都不会使用的硬件,随着法规、测试数据和算法的逐渐完善,再逐渐更新软件来一步步解锁新功能已达到最终的无人驾驶。特斯拉之所以成为整车OTA升级的先行者,核心得益于其超前的汽车电子电气架构,传统车企分布式电子电气架构中ECU数量庞大,单个ECURAM内存容量有限,同时供应商的底层代码和嵌入软件各异,难以完成整车功能的统一更新。而特斯拉采用集中式的电子电气架构,2015款的ModelS大约有15个ECU,此后发布的Model3则直接通过Hardware3.0和三个车身控制器执行来控制行驶、转向和停止等功能,集中的架构和高算力的控制模块支撑了特斯拉整车OTA升级。目前特斯拉已经可以通过OTA的方式实现改善车辆的底盘、信息娱乐、电池续航、ADAS乃至自动驾驶等多项功能,让车的功能迭代更加灵活和便捷,最终变成一台可以不断进化的智能终端。
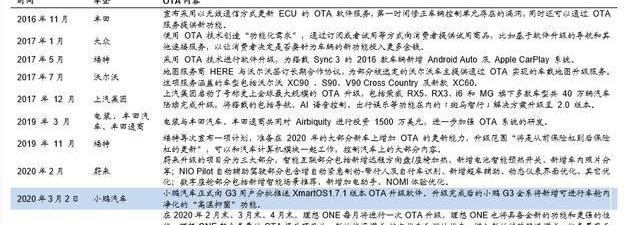
传统车企开始发力布局OTA技术。特斯拉之后,全球传统龙头车企也纷纷致力于改进自身电子电气架构,选择优质域控制器供应商合作,发力布局OTA升级。近年来国内各造车新势力在特斯拉领路下,叠加自身不同于传统制造业的互联网思维,相较于传统车企,造车新势力们在汽车OTA升级方面也呈现出“后来居上”的态势。
域控制器未来走向中央控制器时代
终极阶段——车辆集中式电子电气架构。如博世的经典六段图所示,以域控制器为代表产品的域集中式电子电气架构再往后走,就是集成化程度更高的车辆集中式电子电气架构——Vehiclecomputerandzoneconcept,终极阶段就是Vehiclecloudcomputing,形象来看就是从春秋五霸走向大一统的中央集权制。未来车辆通过用高性能的中央计算单元取代现在常用的分布式计算的架构,将实现“软件定义车辆”的终极目标。
中央控制器更具空间、轻量化、可扩展性优势。相较于域控制器时代的Domaincentralized电子电气架构,基于新一代Central&Zone电子电气架构的汽车设计,能通过ECU集成进一步降低成本,较域控制器更具空间优势、轻量化、车型覆盖多、可扩展性特点,其目标是设计简单的软件插件和实现物理层变化的本地化。
特斯拉最新款的Model3结构就是车辆集中式电子电气架构的典型代表,也是该架构下的第一款量产车型。Model3全车主要有三大控制模块构成,一个是类中央控制模块的自动驾驶及娱乐控制模块Autopilot&InfotainmentControlModule,另外两个分别是右车身控制器BCMRH和左车身控制器BCMLH。
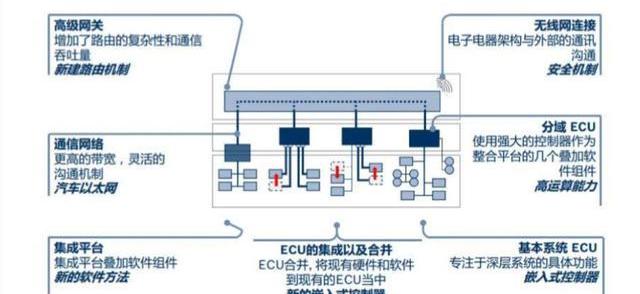
宝马和奥迪也进行中央计算平台的电子电气架构设计。除特斯拉以外,宝马与奥迪也都在进行全新的电子架构设计,命名略有不同,奥迪将新架构命名为中央计算集群,而宝马叫做中央计算平台。在宝马的体系结构中,中央计算平台划分主要的软件功能,这些功能主要在内部开发。这些平台提供高性能,并满足最高的安全要求。集成ECU填充了中央计算平台和普通ECU之间的差距——例如,部署需要直接访问传感器或执行器的时间关键功能。对于简单和非特定于OEM的功能,可以接受普通ECU和传感器和执行器。理想情况下,这些ECU、传感器和执行器基于常见的OEM或者一级供应商的零件。
车载中央计算平台有望最后走向车云计算。车内E/E架构和云端架构越来越接近。云端为各种应用程序提供了基础,可以通过云端为司机提供移动服务。可以对从汽车传输到云端的信息进行分析。车内和云端架构的无缝结合,将成为使我们的E/E基础设施能够处理即将到来的创新的重要一步。
投资建议和推荐标的
汽车电动化、智能化是大势所趋,在车辆向更高级别自动驾驶进化过程中,汽车电子电气架构进入春秋时代,发生了从分布式向域集中式的升级,域控制器应运而生,作为车身区域性的“大脑”,DCU向上接收来自传感器端的信号,向下发送决策信息给执行系统。DCU的普及,将带来硬件和软件的一系列投资机遇。我们基于域控制器产业链进行推荐:
硬件方面——
4)上游芯片端方面,芯片设计工序多由海外垄断,晶圆生产和封装测试工序国内代工企业较多,推荐1)域控制器上游芯片制造工序端的中芯国际、封测龙头长电科技;
5)中游PCB方面,推荐PCB龙头企业沪电股份、景旺电子,建议关注其他车用PCB占比较高的厂商如依顿电子、世运电路等。同时建议关注无源器件MLCC产业相关上市公司;
6)下游控制器总成方面,推荐德赛西威、科博达。同时建议关注域控制器下游核心执行器厂商如线控底盘、ADB车灯等。
软件方面——
关于赋能域控制器的各项软件性能升级,包括多融合传感器算法、标准化软件开发架构AUTOSAR、系统安全ASIL升级、车内以太网应用、整车OTA升级等等,或将带来一系列聚焦算法、安全等计算机和通信企业的发展机遇。
德赛西威:智能座舱龙头企业,智能驾驶推进有序
基本面:质地优秀、财务健康
德赛西威前身历经飞利浦、曼内斯曼威迪欧、西门子等三代外资企业,2010年完成国有化,技术和管理团队基本沿袭老牌欧洲企业,公司质地优良、客户结构突出、员工激励到位,是当前国内自主车机企业龙头。
行业端:座舱电子是智能汽车核心升级零部件,行业增量前景巨大
车机是座舱电子核心组件,是未来智能汽车人机交互的入口,近年来驾驶者对于车载娱乐系统的需求经历了内容、质量、形式的升级。整体趋势是从分区到集成,从按键到一体化屏,单车价值量由原来的600-700提升至2000元以上。
公司端:中短期看车机系统价量双升,远期看ADAS
德赛西威是国内自主车机龙头企业,受益于1)近年来中控屏大屏化和液晶仪表趋势,配套价值量逐年上升;2)2018年以来新客户拓展,配套数量未来可期;同时是国内罕见的日系产业链标的,中短期看公司传统车机主业的客户、产品拓展;长期来看,公司研发水平行业翘楚,ADAS产品进入收获,当前ADAS三款产品量产,贡献超1亿营收,未来看好公司在77HZ毫米波雷达、L3级别智能驾驶域控制器以及车联网产品方面的增长。
盈利预测:未来两年营收复合20%增速,研发费用有望贡献利润弹性
公司2018年在手订单年化70亿,对应未来两年20%营收复合增速,基于研发绝对值保持稳健的假设前提,我们预计公司19/20/21年利润分别为2.9/4.5/6.6亿,维持增持评级。
科博达:一体两翼,汽车电子核心标的
投资逻辑:汽车控制器领域龙头,汽车电子核心标的
科博达是国内为数不多汽车智能、节能电子部件制造商,深耕汽车控制器领域多年,核心客户突破南北大众、大众全球等一流车企,短期受益于车灯LED化趋势量价齐升,长期受益于汽车电子装载率提升下的产品品类扩张。
主业介绍:一体两翼,汽车电子业务多管齐下
公司当前业务一体两翼,车灯控制器:电机控制器:车载电子电器约2:1:1营收比例,其中车灯控制器作为公司传统优势业务,行业受益于LED化市场扩容,全系LED化后国内市场空间近200亿,全球市场空间近600亿;电机控制器和车载电子电器业务在汽车智能化电动化趋势下单车使用量逐渐提升,市场前景广阔。
逻辑一:汽车电子渗透率提升,带动公司产品品类扩张
目前汽车电子在紧凑车型中的成本占比为15%左右,在中高端车型中的成本占比可达30%-40%,而纯电动车中,汽车电子成本占比高达65%,随着汽车新能源、智能化趋势,我国汽车电子成本占比仍将持续提升,预计汽车电子行业全球15000亿、国内6000亿市场。科博达在产控制器产品市场前景广阔,募投项目新增1.4倍产能,汽车电子研发中心启动建设,未来品类有望持续扩张。
逻辑二:车灯产业链核心环节,受益于未来车灯LED、智能化趋势
当前车灯主流光源分为卤素-HID-LED三类,LED车灯是未来车灯主流,科博达车灯控制器主要在HID/LED产品上应用。车灯控制器在LED车灯成本中占比15%-20%,车灯LED化过程中主控制器单元核心受益,1)前大灯:科博达LED主光源控制器收入占比快速上升,毛利率有望改善。2)后尾灯:LED尾灯控制器试产大众、在研宝马。3)氛围灯:氛围灯控制器全车使用量提升。
投资建议:客户优质、发展前景广阔
科博达作为具备优质客户的汽车电子标的,受益于车灯结构升级和汽车智能化,发展前景广阔。我们预计19/20/21年EPS分别1.28/1.52/1.86元。当前新股上市估值相对较高,维持中性投资评级。
星宇股份:好行业+好公司+好格局,具备全球车灯龙头潜质
星宇股份是我们持续重点跟踪和推荐的优质汽车零部件标的,公司作为国内主板主营车灯稀缺上市公司,主业高度专注,崛起于中国汽车工业快速发展期,规模稳健扩张。逻辑:好行业、好格局、好公司,业绩仍有望维持较高增速,毛利率进入上行通道,具备全球车灯龙头潜质。
好行业:国内500亿OEM,智能化+LED看未来
国内车灯前装市场具有约600亿元市场空间,行业将受益于进口替代、产品升级等,行业集中度有望逐步提升,自主品牌份额有望加大。未来车灯发展趋势在于LED大灯、激光灯和智能车灯。星宇通过内生研发布局行业前沿,募投研发中心和LED产能,LED收入占比持续提升,激光大灯研发成功,ADB大灯拿下走量客户订单。
好格局下的好公司:竞争优势显著,突围国内合资车灯竞争圈
行业格局方面,全球车灯市场寡头垄断,区域性龙头占据高地;中国车灯市场”一超多强”,星宇自主突围多强竞争圈。星宇销售净利率全球领先,产品升级速度远超同业。我们认为,中国汽车市场份额高。新车型推出快,为本土车灯品牌提供了绝佳的生长土壤,星宇已经拥有优质客户支持,正向研发+快速响应,或逐渐“挤出”合资车灯企业,是国内最有可能走出全球格局的车灯企业。
高成长:客户扩展+产能扩张+产品升级
客户升级:经历自主-合资-外资的客户升级,2019年以来日系客户进展加速,后期有望伴随日系在华产能扩张稳健增长;产能扩充:佛山二期投产,常州智能制造产业园规划五期,首个海外工厂2020年3月在塞尔维亚进入开工建设,提升前大灯和后组合灯产能;产品升级:公司未来计划降低低价低毛利率的小灯产品占比,提升高附加值占比。
收入稳增,毛利率上行,维持买入
星宇处在起点高、弹性大、持续时间长的车灯赛道上,向高端化、全球化迈出步伐。收入稳健增长,毛利率进入上行通道。我们维持19/20/21年EPS分别为2.90/3.71/4.72元,维持买入评级。
伯特利:线控制动产品切入ADAS执行层,客户高端化升级
掌握制动领域核心技术,实现机械-电控-线控全领域布局
伯特利主业为汽车制动相关产品,主要分为机械制动产品和电控制动产品,机械类产品主要包括盘式制动器、轻量化制动零部件以及真空助力泵,电控类产品主要包括电子驻车制动该系统、制动防抱死系统、电子稳定控制系统以及线控制动系统。目前公司以及完全具备EPB、ABS、ESC等电子类产品独立开发与制造能力,后期逐步向线控制动领域技术渗透。公司客户主要以自主品牌为主,包括长安汽车、奇瑞汽车、吉利汽车、北京汽车、比亚迪等,公司的轻量化制动零部件目前已经获得上汽通用、上汽大众、通用全球、沃尔沃、福特等合资以及外资品牌订单。2019年公司实现营业总收入31.57亿元,同比增长21.29%,归属于上市公司股东的净利润4.02亿元,同比增长69.21%,
持续斩获通用全球大订单,合作持续深化
公司于2019年2月于通用汽车签署供货合同,首次成为通用汽车铸铝转向节以及供应商,对应项目为T1XX铸铝前转向节,项目生命周期为7年,2019年开始批量供货,该平台对应车型在墨西哥销量为35万辆/年,自2019年初至2019年10月T1XX平台项目轻量化产品累计实现收入1.46亿人民币。
此外,公司于2019年11月公布近期与三家通用汽车公司新签署26份产品供货合同,共涉及7个平台项目,12种产品。该项目从2019Q4开始批量供货,均为100%独家供应,项目周期4个月至7年不等,主要依据项目车型的生命周期终止时间。公司预测本次签署的全部供货车型单年度最高产量近130万辆,前述合同预计2020年给伯特利带来新增收入约4亿元人民币,项目车型的生命周期内产品销售收入累计预计将超过18亿元人民币。
投资建议:赛道优质与客户结构优化,维持增持评级
公司所处赛道具备产品升级逻辑,从机械式制动到电控制动再到线控制动,此外,制动系统是智能驾驶执行端的重要组成部分。此外,公司客户结构逐渐优化,前期主要以国内自主品牌为主,近期突破通用、福特、沃尔沃等合资以及外资客户,并且逐步深化与通用全球的合作关系。我们预计公司19/20/21年实现营收31.6/35.6/42.0亿,实现归母净利润4.0/4.9/6.0亿,实现每股收益为0.98/1.20/1.46元,维持增持评级。
……
如需报告原文档请登录。
来源:东方金诚评级 作者|研究发展部丛晓莉 市场动态追踪 1.发行市场显著升温 2020年3月熊猫债发行总额为73亿元,市场累计发行规模已接近3900亿元.
1900/1/1 0:00:00来源:财经小报告 导言 在疫情全球扩散冲击的这一段时间,以美联储为代表的主要央行,启动了历史上罕见的迅速大规模降低利率+购买资产,这究竟会带来什么影响.
1900/1/1 0:00:004月14日,一张央行的农行数字货币钱包内测APP的页面广为流传。4月16日,央行数字货币首个应用场景,将在苏州相城区正式落地。4月16日,国家公布首批数字服务出口基地名单,涉及数十家.
1900/1/1 0:00:00导语:进军新能源、撒币飞行汽车、大张旗鼓搞火箭,吉利在为梦想窒息。中国造车产业有条潜规则,凡进军新能源汽车的企业家,必标榜自己是中国“马斯克”.
1900/1/1 0:00:00作者:行走的翻译C 币圈就像一扇旋转门,送走了一批批离场的人,又迎接着一批批涌入的人。只有守得住的人,才能拨开云雾,终见青天。“最穷的时候,想转型去做O2O.
1900/1/1 0:00:00如需报告请登录。 一、疫情扩散背景下,全球口罩日需求或达数亿只1、我国2月口罩日产量超1亿只突如其来的新冠疫情,极大地引发了口罩需求量的爆发性增长,一时间迎来了“口罩荒”.
1900/1/1 0:00:00