报告出品方:广发证券
以下为报告原文节选
------
一、机器之关节,旋转传动的纽带
连接动力源和执行机构,下游应用广
在机械传动领域,减速器是连接动力源和执行机构之间的中间装置。减速器的发展已有数百年的历史并发展出多种减速器形式。已经成熟并已标准化的产品有圆柱齿轮、蜗轮、行星齿轮、摆线针轮减速器和谐波等;已经提出并正在推广的产品有三环、活齿减速器等。
从结构上减速器分为定轴传动、偏心驱动、斜面放大三大类。其中偏心驱动的减速原理是利用具有相对运动的、存在度量差的两运动件的微差累积来实现减速器的力矩放大和低速输出,具有少齿差转动特征,包括变形类的谐波减速器、多齿的行星减速器等;斜面放大则是通过连续旋转的斜面将沿斜面运动的圆周力在其正交方向放大,从而将旋转运动转变为直线运动,包括滚珠丝杠等。
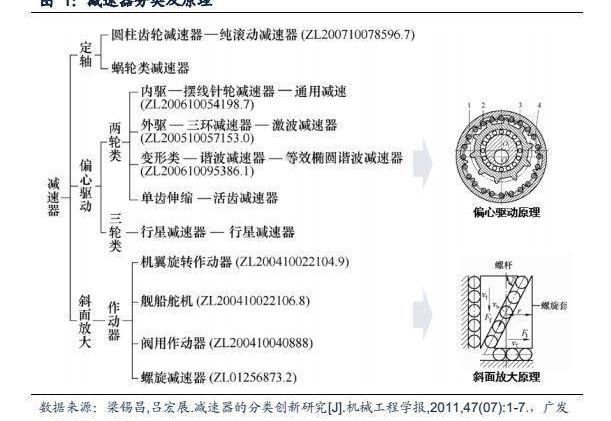


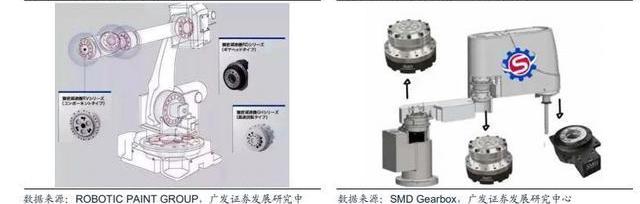
减速机广泛应用于国民经济各领域,不同产品下游有所差异。谐波和RV减速器主要应用于工业机器人领域,同时部分应用于非标自动化、机床、半导体等精密制造行业;齿轮、摆线针轮等通用减速器则更广泛应用于环保、建筑、电力、化工、食品等工业领域。

慢雾:昨日MEV机器人攻击者恶意构造无效区块,建议中继运营者及时升级:金色财经报道,慢雾分析显示,昨日MEV机器人被攻击的问题原因在于即使信标区块不正确,中继仍将有效载荷(payload)返回给提议者,导致了提议者在另一个区块被最终确定之前就能访问区块内容。攻击者利用此问题,恶意构造了无效的区块,使得该区块无法被验证,中继无法进行广播(状态码为202)从而提前获得交易内容。mev-boost-relay昨日已紧急发布新版本缓解此问题,建议中继运营者及时升级中继。
据此前报道,昨日夹击MEV机器人的恶意验证者已被Slash惩罚并踢出验证者队列。[2023/4/4 13:43:37]
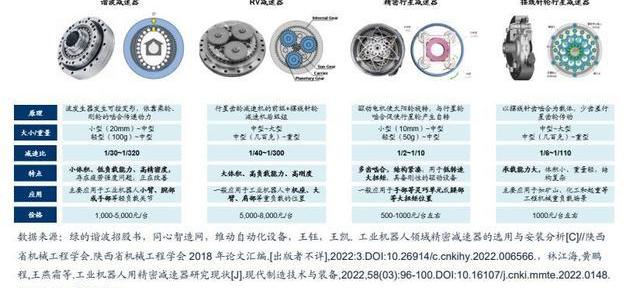
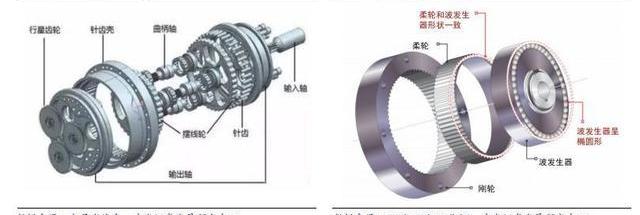
机器人常用减速器包括谐波、RV、行星齿轮、摆线针轮减速器,减速器选择需要综合考虑体积、减速比、扭矩和价格因素。谐波减速器:利用柔轮、刚轮和波发生器的相对运动减速,波发生器发生可靠形变后,依靠柔轮、刚轮的啮齿传递动力。特点为小体积、低负载能力、高精密度,用在工业机器人小臂、腕部等轻负载关节,代表企业绿的谐波。RV减速器:由渐开线圆柱齿轮行星减速前级和摆线针轮行星减速后级两部分构成,渐开线行星齿轮与曲柄轴连接成一起作为摆线针轮传动部分的输入,曲柄轴带动摆线轮作偏心运动。其特点为大体积、高负载能力、高刚度,但价格昂贵,用在工业机器人机座、大臂等重负载的位置,代表企业双环传动。行星齿轮减速器:精密行星减速器在运行过程中一个太阳轮有多个行星轮绕转,所以其体积小、质量较轻,相较于其他减速器启动更加平稳,且刚性、精度和扭矩高。其特点为结构紧凑、低转速大扭矩、价格便宜但减速比低,精密行星减速器用在直角坐标工业机器人,也可以用在人形机器人小型关节或者运动关节领域,代表企业为中大力德、兆威机电。
摆线针轮行星减速器:以应用行星式传动为基础、以摆线针齿啮合为载体的传动装置。其特点为承载能力大,而相对于RV减速器价格更低,常用在矿山、化工等重负载领域,在部分机器人领域也有所推广。
Rabbithole联合创始人:发现近三分之一用户是机器人,将移除XP数据:3月25日消息,链上激励平台Rabbithole联合创始人Brian Flynn发推表示,该项目决定移除用户完成任务获得的XP数据,因为发现完成任务的用户中有近三分之一是机器人,这种游戏化的机制导致平台充斥着雇佣兵和空投猎人。
Brian Flynn还表示,过去兑换了技能并获得了 XP 的用户可以领取一个冒险徽章,可以作为灵魂绑定型 NFT 在应用程序之间随身携带。很快,用户可以将他们完成的技能铸造为链上凭证,这将为他们在寻找合格的加密原生人才的 web3 项目中提供独家优势。[2022/3/25 14:18:22]
减速器是工业机器人核心零部件之一
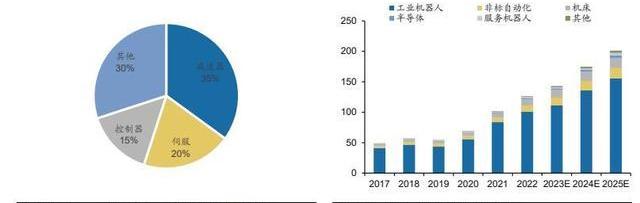
控制器、伺服电机和减速器是工业机器人的三个核心部件,从技术上决定了工业机器人的关键特性,如工作精度、负载、使用寿命、稳定性和可靠性,根据ResearchInChina数据,它们合计约占工业机器人成本的70%,其中减速机占35%,伺服电机占20%,控制器占15%。一般来说,机器人的每个关节都需要配置一台减速器。根据绿的谐波招股书,每台六轴多关节机器人需要搭配6台精密减速器,其中负载10kg以下机器人主要使用谐波减速器;10-20kg及更高负载的机器人小臂、手腕关节可以采用谐波减速器,其余关节采用RV减速器。协作机器人全部关节使用谐波减速器,一般使用6-7个谐波减速器。SCARA机器人一般使用2-3台谐波减速器。DELTA机器人一般使用3台谐波减速器,可实现分拣等功能。
在美SEC注册的加密机器人顾问Makara正式推出:金色财经报道,在美国证券交易委员会(SEC)注册的加密机器人顾问Makara已正式推出。Makara表示,通过新加入的Beta版客户,其管理资产总规模达到“数百万美元”。据悉,传统的机器人顾问主要会将客户的钱投资于交易所交易基金(ETF),但显然美国目前没有任何加密ETF。因此,该应用程序将提供六个“主题篮子”资产,这些资产围绕客户可能具有的不同投资意愿而构建。这些篮子包括专门针对比特币、以太坊和去中心化金融(DeFi)进行加权的篮子。Makara正在与Gemini合作来处理基础资产的购买、出售和存储。[2021/6/1 23:02:42]
人形机器人关节驱动模式影响减速器选择
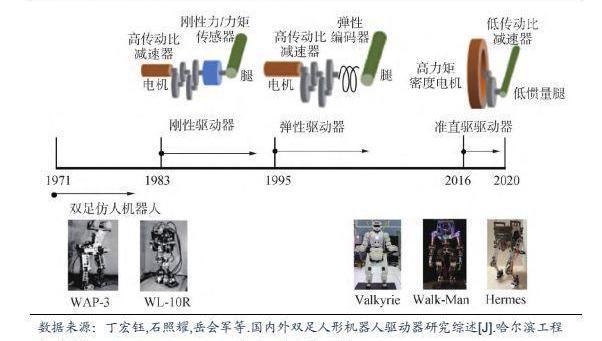
机器人电驱可以分为刚性驱动、弹性驱动和准直驱驱动等不同模式。双足人形机器人关节运特点和人类类似,如运动速度快,机动性能好,步幅和步频变化,高速碰撞等。这些运动特点要求驱动器具有高功率密度、高响应性、高能量利用效率和耐冲击性等特性。为提高驱动器该类特性,逐渐发展出三类主流路线。1983年,早稻田大学研究的WL10R机器人使用刚性驱动器TSA(traditionalstiffnessactuator),自此双足人形机器人开始广泛应用刚性驱动器为关节动力源。刚性驱动发展历史长、技术成熟度高,但是由于元器件工艺和原理上的限制,传统刚性驱动器的功率密度很难达到生物肌肉的水平500W/kg,同时也解决不了机器人受外部冲击时零部件强度问题,继而产生了其他技术路线。1995年,麻省理工学院的Pratt等提出了弹性驱动器SEA(serieselasticactuator)的概念,并在美国宇航局的机器人Valkyrie和意大利技术研究院的机器人Walk-Man上得到应用,弹性驱动器模拟肌肉系统功能,使关节表现出柔顺、安全和高能量效率特性。2016年,Wensing等提出了准直驱驱动器PA(proprioceptiveactuator),并将其应用于四足机器人Cheetah和双足机器人Hermes,准直驱驱动采用电机加低传动比减速器的方案,负载传导路径更加简单,具有功率密度高,力控带宽大,抗冲击能力强等优点,准直驱驱动器成为最近几年研究的热点。
Ripple CTO:大多数交易似乎是机器人争夺订单中头寸,很少有恶意交易:近日有研究报告称XRP平台上大多数交易无价值。Ripple回应了该篇研究报告,首席技术官David Schwartz表示,该报告听起来是真实的,而此类活动只是分类账的速度、负担能力和容量的证明。他表示,大多数交易似乎都是机器人在争夺订单中的头寸,很少有恶意交易。David Schwartz还表示,采取措施消除垃圾邮件发送者可能会给XRP交易者带来严重的损失。此前报道,有研究人员撰写了一份研究报告称,EOS、Tezos及XRP三大区块链平台上大多数交易无价值,XRP分类帐中只有2%的交易会导致价值转移。(The Daily Hodl)[2020/5/11]
不同驱动模式架构和特性不同,进而影响减速器等零部件的选型:
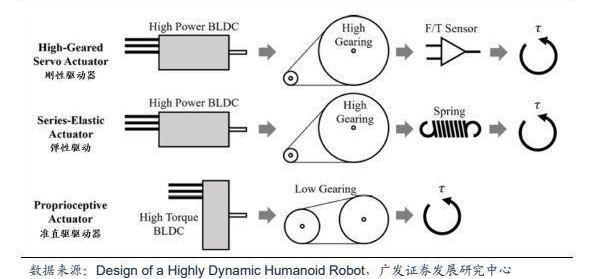
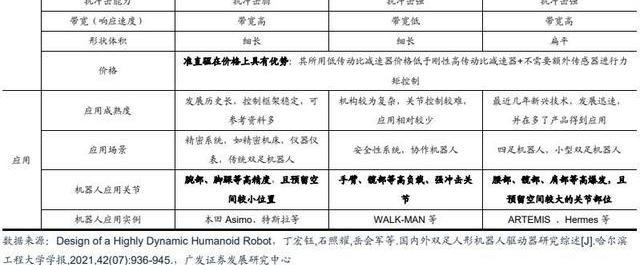
刚性驱动:①组成:一般采用高速电机+高传动比减速器+高刚性力矩传感器模式,谐波减速器凭借高减速比、重量轻、紧凑高效的特征获得青睐,力/扭矩传感器放置于关节末端进行感知控制。②特点:传动比大+转速低+扭矩密度高,因而具有更高的可控制精度,但是传统刚性驱动器的功率密度很难达到生物肌肉的水平,同时也解决不了机器人受外部冲击时零部件强度问题,适用于缓慢且相对静态的运动。③应用:发展历史长,控制框架稳定,本田Asimo、特斯拉人形机器人均采用该方案;同时,刚性驱动更为适配于腕部、脚踝等高精度,且预留空间较小位置。弹性驱动:①组成:在刚性驱动器的基础上加入弹性体来增加机器人行走、奔跑、跳跃等运动能力,包括串联、并联、多模态等众多模式。②特点:类比于动物利用刚柔并济的肌肉骨骼系统在运动过程中储存/释放能量并实现缓冲,弹性驱动器使关节表现出柔顺安全、高能量效率、强抗冲击性的特性;但是较低的刚度会影响带宽,进而降低响应速度并增加控制难度。③应用:机构较为复杂,关节控制较难,常用语高负载、强冲击等特殊场景,如意大利技术研究院为解决救灾机器人跌落和与环境的碰撞问题,设计了弹性驱动器,并应用于WALK-MAN机器人的手臂,具有较好的负载能力和抗冲击能力。准直驱驱动:①组成:一般采用高扭矩密度电机+低传动比减速器方案,常采用低转速大扭矩的扁平化的力矩电机和低传动比且结构紧凑的行星齿轮减速器;同时,电流可以作为力矩的测量方式,因而不需要配置力矩传感器。②特点:传动比小+转速高+功率密度高,因为更为高效并具有更强的爆发力,同时准直驱在价格上具有优势,其所用低传动比减速器价格低于刚性高传动比减速器,且不需要额外传感器进行力矩控制;③应用:最近几年新兴技术,发展迅速,并在四足机器人和ARTEMIS、Hermes等双足机器人也有所应用,该类机器人更善于运动;同时,准直驱驱动更为适配于腰部、髋部、肩部等高爆发,且预留空间较大的关节部位。
动态 | 硅谷区块链公司用区块链等手段解决机器人问题:据ofweek报道,硅谷的区块链公司Kambria希望通过区块链的开源及经济激励特性,利用社区的力量解决机器人当前被技术难、成本高而“锁住”的问题。[2018/10/22]

1.刚性驱动器:高扭矩密度+高精度,可执行复杂任务但爆发力不足
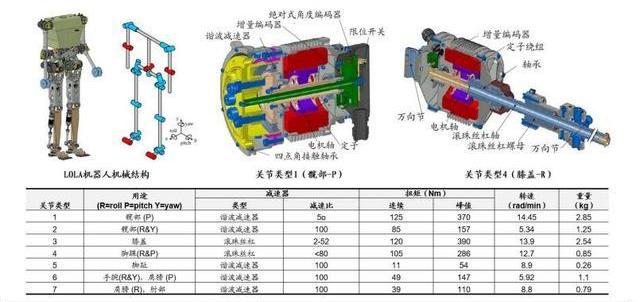
刚性驱动器在特斯拉人形机器人、本田Asimo机器人、慕尼黑工大LOLA机器人,特点为力矩密度大,力量控制精准,可以像人一样执行复杂任务,但运动速度普遍较低,爆发力不足。特斯拉人形机器人身高1.72m体重56kg,共有40个主动自由度和6类执行器,实际可举起68kg的物体,运动速度为8km/h,并能执行收拾杯盘等复杂任务,可以做到精准力矩控制,如碰撞到鸡蛋不会打碎。其采用直线、旋转两类执行器,其中旋转执行器为刚性结构,采用力矩电机+谐波减速器+位置/扭矩传感器方案,旋转执行器分为三种类型,其中之一扭矩达180Nm,仅重2.26kg,扭矩密度达80Nm/kg。本田Asimo机器人推出于2000年,身高1.30m体重50kg,共有57个自由度,单手抓力0.5kg,跑步速度为7km/s。Asimo可以进行面部、声音的识别,具备敏捷的运动能力,可以向前跑步、向后退、单/双腿跳跃,并能灵活地适应不断变化的外部情况,如在不平坦的表面上行走;在执行任务方面,可以做到拿起玻璃瓶并拧开盖子,或进行复杂手语表达。Asimo执行器采用伺服电机+谐波减速器的方案,并配有六力传感、加速度、陀螺仪等多个传感器。LOLA人形机器人推出于2006年,可以进行类似于人的步行运动,身高1.80m,共有22个自由度和7类执行器,运动速度5km/h。LOLA在膝盖和脚踝采用滚柱丝杠线性执行器,特点为无间隙、无启动扭矩、可反向驱动和静音运行,并将大部分执行器的质量转移到靠近臀部的位置,从而优化大腿的惯量;其余关节采用谐波减速器的刚性传动方案,其髋部关节连续扭矩为125Nm,重量2.85kg,扭矩密度44Nm/kg,具有重量强、扭矩大的特点;同时,每个关节配有位置传感器、角度编码器、增量编码器,其关节特点为高速状态下良好的动态性能、紧凑集约以及高效率。

2.弹性驱动器:刚性驱动器基础上的优化,提高抗冲击能力
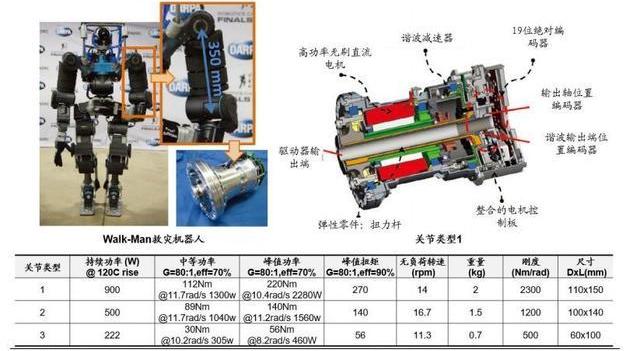
机器人在于环境相互作用中不可避免发生坠落事件,因此需要具备过载能力,在发生碰撞和跌到后能够自我恢复。意大利技术研究院设计了新型的弹性驱动器,并应用于WALK-MAN机器人手臂,驱动器采用无框无刷直流电机+谐波减速器的模式,并在谐波减速器输出端和驱动器输出间设置了弹性零件扭力杆实现了防冲击保护,并配有位置、扭矩、温度传感器。
3.准直驱驱动器:高功率密度和更好的抗冲击能力,省去传感器但半径较大
准直驱驱动器依靠驱动器电机开环力控,不依赖于附加力或力矩传感器,就可以本体感知机器人脚部和外界的交互力,也被称为本体驱动器。驱动器有更高的功率密度,同时低传动比减速器能够更好将外部冲击传递给电机,实现高带宽力控和更好的抗冲击能力。然而,大扭矩对电机的尺寸要求更为苛刻,电机呈现扁平化,执行器半径更大。准直驱驱动器应用于MIT推出的Cheetah四足机器人以及UCLA推出的ARTEMIS人形机器人等。
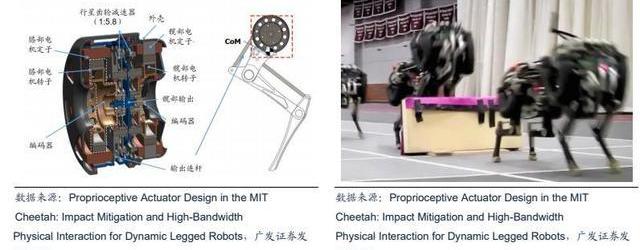
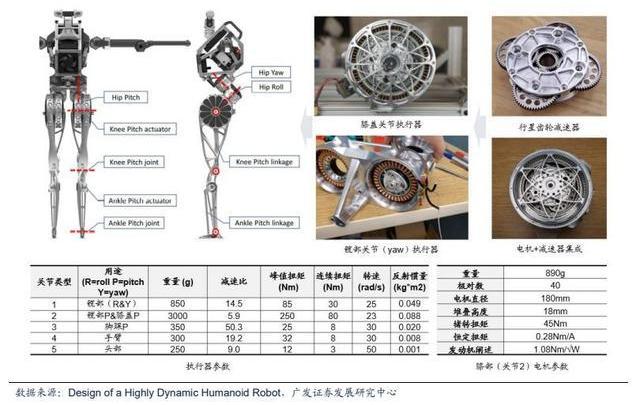
MIT的Cheetah四足机器人具备步行、跑步和跳跃能力,机器人的最高奔跑速度可达13.5m/s。此类行为涉及反复的高冲击力和短暂的地面接触时间,为了在如此短的时间内控制地面反作用力,系统必须具有高带宽力控并能承受频繁的高冲击力。机器人采用准直驱执行器,定制设计大半径的无框力矩电机,纯电机扭矩密度达27Nm/kg;减速器选用减速比为5.8的单级行星齿轮减速器,低减速比提高动态运动能力;另外,机器人髋部和膝部的执行器同轴位于髋部,其中一个执行器直接驱动臀部,而另一个则通过平行连杆驱动膝盖,旨在最大限度地减少质量和腿部惯性,从而最大限度地提高冲击缓解系数。UCLA的ARTEMIS人形机器人身高1.42cm,体重37kg,行走速度2.1m/s,共有20个自由度和5种类型执行器,能够在粗糙和不稳定的表面上行走,在外部撞击中能保持平衡,跌到后重新站起,以及具备跑步、跳跃、足球运动等能力。机器人髋部/膝部P轴执行器采用宽大气隙电机+行星齿轮减速器方案,执行器总重量3kg,连续扭矩80Nm,扭矩密度27Nm/kg。机器人腿部低反射惯性和高传输透明度可以使得机器人能够本体感知力控,并在跑步和跳跃中降低冲击力。
---报告摘录结束更多内容请阅读报告原文---
报告合集专题一览X由定期整理更新
精选报告来源:报告派
科技/电子/半导体/
人工智能|Ai产业|Ai芯片|智能家居|智能音箱|智能语音|智能家电|智能照明|智能马桶|智能终端|智能门锁|智能手机|可穿戴设备|半导体|芯片产业|第三代半导体|蓝牙|晶圆|功率半导体|5G|GA射频|IGBT|SICGA|SICGAN|分立器件|化合物|晶圆|封装封测|显示器|LED|OLED|LED封装|LED芯片|LED照明|柔性折叠屏|电子元器件|光电子|消费电子|电子FPC|电路板|集成电路|元宇宙|区块链|NFT数字藏品|虚拟货币|比特币|数字货币|资产管理|保险行业|保险科技|财产保险|机器人
近日,人民币国际化迈进了新的里程碑。据报道,印度炼油商纷纷开始使用人民币结算购买俄罗斯原油。这一举措不仅标志着人民币在国际贸易中的地位不断提升,也有助于促进中印两国经济合作与发展.
1900/1/1 0:00:00“杨平主动投案时只承认了自己的小部分受贿事实,对其他的违法行为有所保留,妄图蒙混过关,换一个‘从宽处理’……”日前,广西壮族自治区凤山县召开干部警示教育大会.
1900/1/1 0:00:00特斯拉的Cyberquad玩具车是一款受欢迎的儿童电动车。它在特斯拉中国官网上架后,引起了广泛关注和购买热潮.
1900/1/1 0:00:00引子 我曾写过一篇文章《5位陷入绝境的亿万富豪:有的跳楼,有的沉湖,有的自焚》,当时有人就说,这些都是以前的富豪,思想有点守旧,现在的富豪精明多了,不会再出现这类傻逼事.
1900/1/1 0:00:00从跌破7.28到回到7.2门槛之内,近期人民币汇率再度迎来反弹。7月13日,人民币对美元中间价调升238个基点,报7.1527,升幅创2023年3月24日以来最大.
1900/1/1 0:00:00尤派数字传媒元宇宙是新一代信息技术集成创新在各行各业的创新应用,涉及数字孪生、区块链、人工智能、云计算、物联网和虚拟现实等一系列关键技术,通过元宇宙发展相关产业,可以促进数字技术升级与融合.
1900/1/1 0:00:00